空间机器人工程中心由长光所和哈工大共建,成立于2012年。以空间机械工程为专业方向,以空间机械设计与制造、飞行器环境工程为依托,开展航天器特别是运动机械、智能机器人的机电设计、力学设计、热控设计及试验验证工作。
中心的发起团队自80年代开始cad/cae/cam设计与研究以来,先后开展了三维设计技术研究、光/机/电 / 热集成仿真技术研究、空间光学遥感器热控及空间环境工程研究等工作。
定位:面向国家与市场需求,坚持科技创新的发展道路,聚焦空间机械,开展空间机械、空间机构的基础性研究和应用研究,开发空间机械、空间光学遥感相关的光、机、电、热产品,建成国内一流的空间机械与环境工程研发中心。
中心下设工程技术研究室和机器人系统创新研究室。
工程技术研究室学科规划
新型空间机械、机器人结构设计与研究
空间机械、机器人关键技术、关键单机 / 部件的研制
空间机器人的小型化、模块化、型谱化
机器人红外视觉与测量技术研究
空间机器人环境适应性研究
空间光学遥感器光、机、电、热集成设计与研制
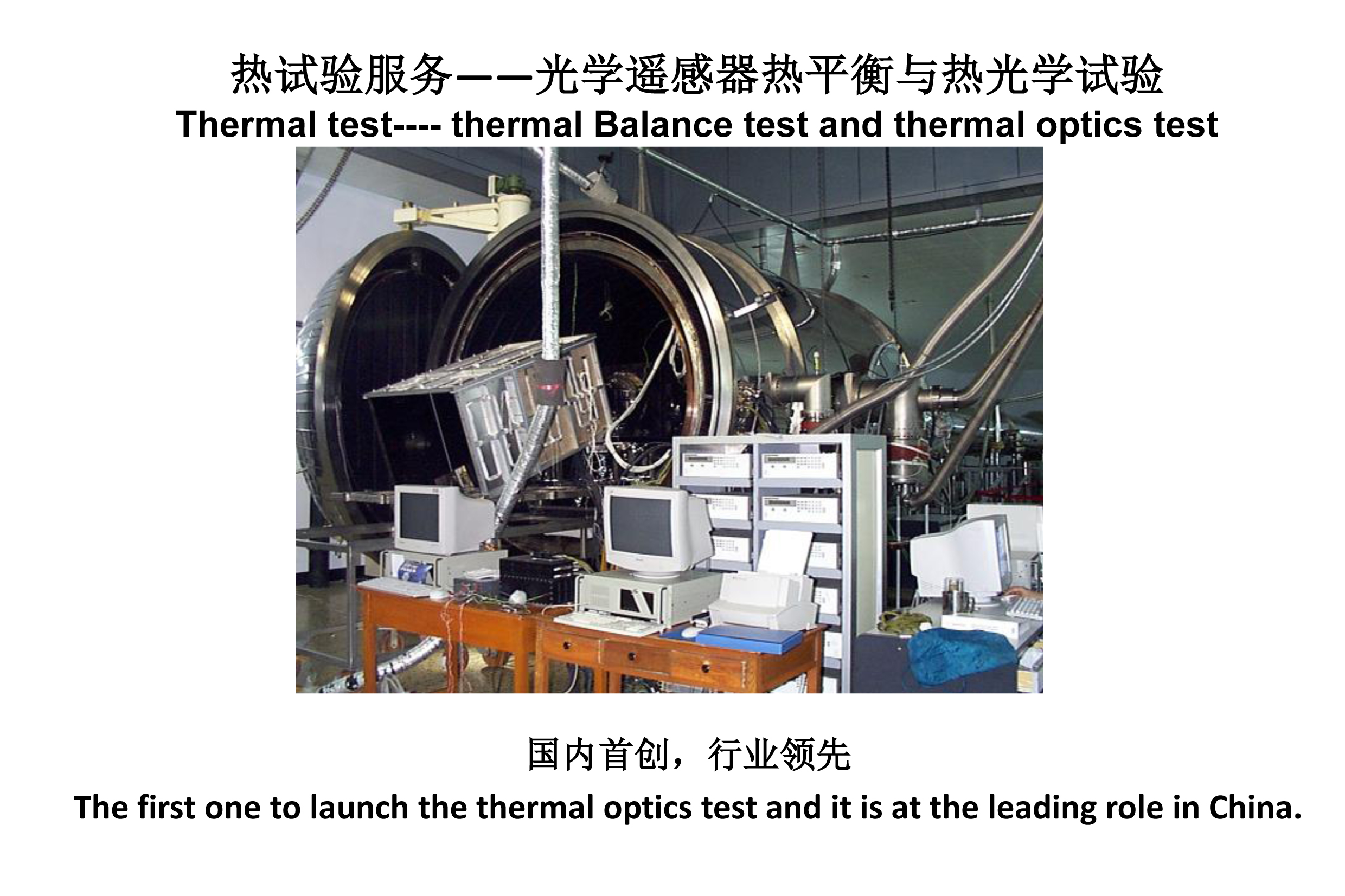
飞行器及其载荷的热设计与试验技术研究与研制
机器人系统创新研究室学科规划
新概念空间机器人系统研究
空间机械、机器人关键技术、关键单机 / 部件的研究与研制
空间微振动及其抑制技术研究
精密测量、定位与指向技术研究
空间光学遥感器光、机、电、热集成仿真技术研究
空间飞行器及其载荷的抗力学设计与试验技术研究与研制
空间飞行器及其载荷的综合控制技术研究
想要了解更多信息,请点击链接